ناقل واجهــة الطرفيــات المتسلسلــة (SPI) هو نظام للاتصالات التسلسلية، والذي يستخدم ما يصل إلى أربعة أطـراف، عادةً ثلاثة. يتم استخدام طرف واحد لتلقي البيانات، وواحد لإرسال البيانات، وواحد للمزامنة، وواحد بدلاً من ذلك لاختيار جهاز للاتصال به. وهو اتصال مزدوج كامل، مما يعني أنه يتم إرسال البيانات واستقبالها في وقت واحد. الحد الأقصى لمعدل نقــل البيانات Baud rate أعلى من ذلك الموجود في نظام الاتصالات I2C.
تستخدم واجهــة الطرفيات المتسلسلــة الأطراف الأربعــة التاليــة:
يتــم أستخدام الدوال التاليــة في إتصــال الـ SPI يجــب عليك أولاً تضمين مكتبــة SPI.h
يــوجــد أربعــة أوضــاع للتشغيــل في أتصــال الـ SPI هــم:
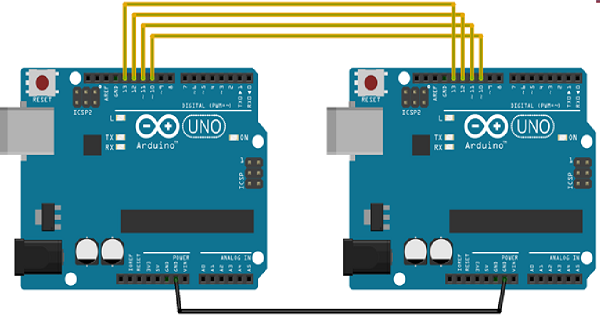
الآن، سوف نقوم بربط لوحتي Arduino UNO معًا؛ أحدهما سيد والآخر كتابــع. سنقــوم بتــوصيل الأطراف كالتالــي:
الأرضي مشترك. فيما يلي الرســم التخطيطي للتوصيــل بين اللوحتين
#include <SPI.h>
void setup (void) {
Serial.begin(115200); //set baud rate to 115200 for usart
digitalWrite(SS, HIGH); // disable Slave Select
SPI.begin ();
SPI.setClockDivider(SPI_CLOCK_DIV8);//divide the clock by 8
}
void loop (void) {
char c;
digitalWrite(SS, LOW); // enable Slave Select
// send test string
for (const char * p = "Hello, world!\r" ; c = *p; p++) {
SPI.transfer (c);
Serial.print(c);
}
digitalWrite(SS, HIGH); // disable Slave Select
delay(2000);
}
مثــال
#include <SPI.h>
char buff [50];
volatile byte indx;
volatile boolean process;
void setup (void) {
Serial.begin (115200);
pinMode(MISO, OUTPUT); // have to send on master in so it set as output
SPCR |= _BV(SPE); // turn on SPI in slave mode
indx = 0; // buffer empty
process = false;
SPI.attachInterrupt(); // turn on interrupt
}
ISR (SPI_STC_vect) // SPI interrupt routine {
byte c = SPDR; // read byte from SPI Data Register
if (indx < sizeof buff) {
buff [indx++] = c; // save data in the next index in the array buff
if (c == '\r') //check for the end of the word
process = true;
}
}
void loop (void) {
if (process) {
process = false; //reset the process
Serial.println (buff); //print the array on serial monitor
indx= 0; //reset button to zero
}
}

الطائــف - المملكــة العربيــة السعــوديـة
المختــرع المجنــون © جميـــع الحقــوق محفوظــة